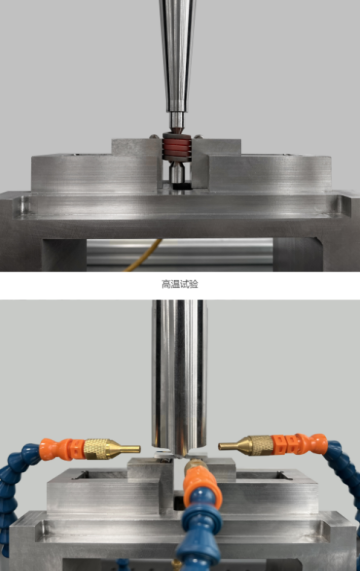


La nostra azienda ha consegnato con successo un'attrezzatura sperimentale per diffrazione e imaging in situ ad alta temperatura e alta frequenza di fatica
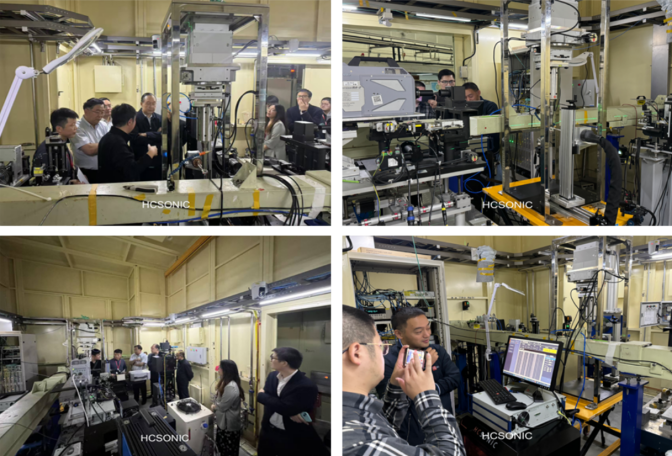
Hangcao Technology ha installato con successo attrezzature per diffrazione e imaging in-situ per test di fatica ad alta temperatura e alta frequenza presso il Centro Sincrotrone di Shanghai. Scopri come questa innovazione promuove la ricerca sulla fatica e le capacità di test multifunzionali.
SCOPRI DI PIÙ